GIA TỐC LÀ GÌ?
Gia tốc là tốc độ mà vận tốc của một vật thay đổi so với thời gian (nó là đạo hàm của vectơ vận tốc dưới dạng một hàm của thời gian a = dv / dt). Nó là kết quả Net của bất kỳ và tất cả các lực tác động lên một vật thể.
Có một sự khác biệt lớn trong việc thực hiện hai mục đích đo lường này. Thông tin quan trọng nhất, khi đo gia tốc rung động, là phần động của tín hiệu (đối tượng không chuyển động). Khi đo khả năng vào cua hoặc tăng tốc / phanh của xe, kết quả
Do đó, các cảm biến để đo sự thay đổi chuyển động của xe phải có khả năng đo gia tốc tĩnh (như trọng lực) trong khi các cảm biến đo rung động thường loại bỏ phần tĩnh khỏi kết quả đã được thiết kế bên trong cảm biến.
Tốc độ là đạo hàm của độ dịch chuyển (v = ds / dt), chúng ta cũng có thể đo gia tốc bằng phép toán đạo hàm vận tốc và đạo hàm 2 lần độ dịch chuyển. Đây là một trường hợp thực tế khi đo sự dịch chuyển bề mặt bằng cách sử dụng các đầu dò dòng điện xoáy hoặc laze.
Nó cũng rất phổ biến khi bạn cũng sử dụng phép đo gia tốc để đo vận tốc và độ dịch chuyển.
Các nguyên tắc tích phân là khác nhau. Khi tích phân chuyển động của một chiếc xe, gia tốc tĩnh sẽ dẫn đến sự thay đổi của vận tốc (và độ dịch chuyển). Chúng ta cần biết rằng khi phép đo gia tốc có sai số, kết quả tốc độ và khoảng cách cũng sẽ bị lệch. Những độ lệch này phụ thuộc vào chất lượng của cảm biến gia tốc. Ví dụ, với các cảm biến chất lượng cao, tàu ngầm có thể chạy trong nhiều tuần mà vẫn tính toán được vị trí chính xác của chúng. Thông thường, chúng tôi sử dụng một cảm biến khác để bù lỗi. Một trong những tổ hợp cảm biến được sử dụng rất thường xuyên là cảm biến gia tốc / tỷ lệ rẽ / cảm biến GPS.
Khi đo rung động, phần tĩnh không quan trọng và do đó phải được loại bỏ khi tích phân bằng các bộ lọc tần số cao.
Các phép đo gia tốc được chia thành các loại sau:
CẢM BIẾN ĐO GIA TỐC LÀ GÌ?
Cảm biến đo gia tốc hay còn gọi là gia tốc kế là thiết bị tạo ra các tín hiệu điện (điện áp, điện tích, …) tương ứng với gia tốc đã trải qua. Có một số kỹ thuật để chuyển đổi gia tốc thành tín hiệu điện. Chúng tôi sẽ đưa ra một cái nhìn tổng quát về hầu hết các trường hợp đó và sau đó xem xét sơ qua một vài phần khác.

NGUYÊN LÝ CƠ BẢN CỦA CÁC CẢM BIẾN ĐO GIA TỐC:
Hầu hết các cảm biến đo gia tốc đều dựa trên định luật thứ nhất và thứ hai của Hooke và Newton.
Định luật Hooke phát biểu rằng lực F cần thiết để kéo dài hoặc nén một lò xo tỷ lệ với sự thay đổi của khoảng cách x theo hệ số k (một hệ số đặc trưng không đổi của lò xo). Phương trình là F = k * x.
Định luật I của Newton phát biểu rằng một vật thể đứng yên hoặc liên tục chuyển động với vận tốc không đổi trừ khi bị tác động bởi một lực khác. Định luật thứ hai của ông phát biểu rằng lực F do một vật chuyển động tạo ra bằng khối lượng của nó m nhân với gia tốc a, cho phương trình F = m * a.
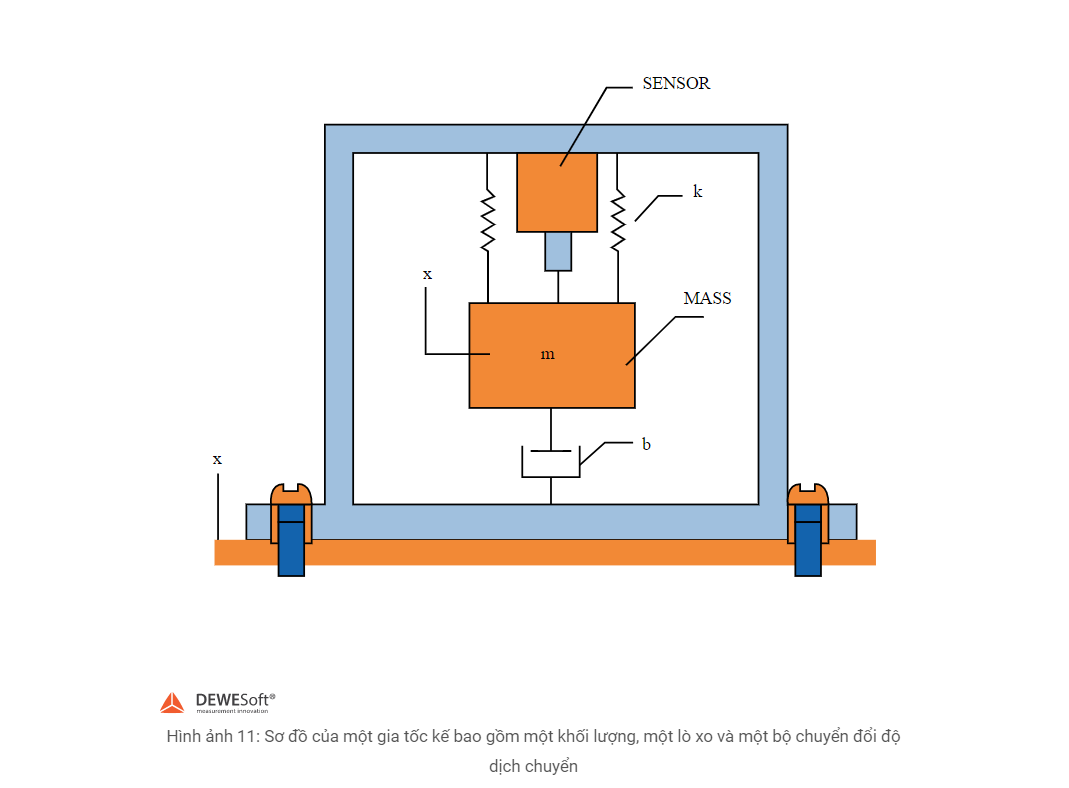
Cách chung nhất, để tận dụng các định luật này, là treo một khối lượng lên một lò xo từ một khung bao quanh khối lượng (như trong hình bên dưới). Khi khung bị lắc, nó bắt đầu chuyển động, kéo theo khối lượng cùng với nó. Nếu khối lượng chịu cùng gia tốc với khung thì cần phải có một lực tác dụng lên khối lượng thì lò xo mới dãn ra. Chúng ta có thể sử dụng bất kỳ đầu dò dịch chuyển nào (chẳng hạn như đầu dò điện dung) để đo độ lệch này.
Gia tốc kế chung bao gồm một khối lượng, một lò xo hoặc một hệ thống tương tự và một bộ chuyển đổi độ dịch chuyển:
CÁC LOẠI CẢM BIẾN ĐO GIA TỐC:
Gia tốc kế được thiết kế bằng cách sử dụng các nguyên lý cảm biến khác nhau. Dưới đây là tổng quan nhanh và tóm tắt để bạn hiểu rõ hơn về chúng:
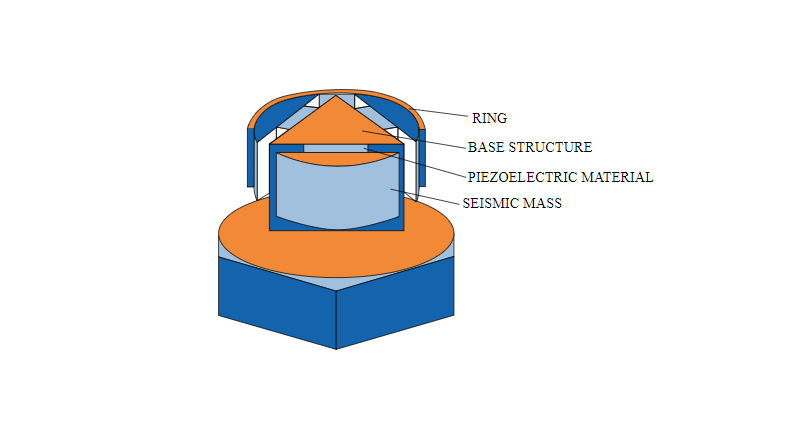
CẢM BIẾN ĐO GIA TỐC HOẠT ĐỘNG TRÊN NGUYÊN LÝ ÁP ĐIỆN
Áp điện là khả năng của một số vật liệu (đặc biệt là tinh thể và một số đồ gốm – vật liệu áp điện đã biết như thạch anh, tourmaline, gốm (PTZ), GAPO4, …) tạo ra một điện thế để phản ứng với ứng suất cơ học. Điều này có thể ở dạng sự phân tách điện tích qua mạng tinh thể. Nếu vật liệu không bị đoản mạch, điện tích đặt vào sẽ tạo ra một hiệu điện thế trên vật liệu. Các vật liệu tạo ra điện tích khi có lực tác dụng lên chúng sẽ thể hiện cái gọi là hiệu ứng áp điện.
Cảm biến đo gia tốc áp điện yêu cầu bộ khuếch đại điện tích bên ngoài để điều hòa tín hiệu được gọi là cảm biến đo gia tốc chế độ điện tích. Cảm biến đo gia tốc áp điện chế độ điện áp được tích hợp sẵn mạch điện tử bên trong để chuyển đổi tín hiệu điện tích trở kháng cao thành tín hiệu điện áp trở kháng thấp được gọi là IEPE. IEPE đã được chấp nhận làm tiêu chuẩn bởi các nhà sản xuất cảm biến, máy phân tích và thu thập dữ liệu trong ngành. Cảm biến áp điện thường được sử dụng trong phân tích phương thức, sàng lọc ứng suất môi trường, sự kiện bắn pháo hoa, kiểm tra độ rung trên mặt đất của máy bay, kiểm tra chuyến bay của máy bay cũng như bảo trì dự đoán và phòng ngừa.
Cảm biến đo gia tốc IEPE:
Tất cả các cảm biến đo gia tốc chế độ điện áp này đều được cấp nguồn bởi điện áp một chiều được điều chỉnh và dòng điện kích thích cảm biến không đổi từ 2 đến 20 mA trên sơ đồ hai dây đơn giản. Thiết bị điện tử tích hợp chuyển đổi tín hiệu điện tích trở kháng cao do vật liệu áp điện tạo ra thành tín hiệu điện áp trở kháng thấp có thể sử dụng được ngay bên trong đầu dò. Vì đầu ra có trở kháng thấp, tín hiệu có thể được truyền qua khoảng cách cáp dài và được sử dụng trong môi trường bẩn hoặc môi trường nhiễu với chất lượng tín hiệu được bảo toàn đáng kể. Cảm biến IEPE cần nguồn điện 4 mA hoặc 8 mA và chúng thường phát ra tín hiệu 5 vôn, do đó, việc truyền những tín hiệu này qua cáp dài hơn sẽ dễ dàng hơn nhiều. Ngoài ra, bộ khuếch đại cho các cảm biến này dễ chế tạo hơn nhiều và do đó, rẻ hơn so với các cảm biến áp điện bình thường. Dải đo khá hạn chế ở khoảng 100g
Cảm biến đo gia tốc dạng điện tích (Charge):
Ngược lại với IEPE, các cảm biến dạng điện tích không cần điện áp kích thích từ bên ngoài, các phần tử cảm biến sẽ xuất ra 1 điện tích khi bị tác động bởi lực, các điện tích này có trở kháng cao vì vậy tín hiệu điện tích rất nhạy cảm với nhiễu từ môi trường xung quanh và cần thực hiện một số biện pháp phòng ngừa quan trọng để có các phép đo phù hợp, đặc biệt tín hiệu điện tích trong cảm biến chỉ truyền được trong khoảng cách ngắn và yêu cầu cáp phải có khả năng chống nhiễu tốt.Các vật liệu áp điện bên trong cảm biến không thể giữ các tín hiệu điện tích trong thời gian dài vì vậy nó chỉ phù hợp cho các ứng dụng đo nhanh, nói cách khác, nó chỉ cảm nhận các sự kiện động (lên tới hàng nghìn g) và do đó không thể được sử dụng để đo gia tốc DC chỉ đo được các gia tốc có tần số từ 1/2 hoặc vài Hz.Với thiết kế bên trong là phần tử cảm biến có khả năng chịu nhiệt độ cao nên các cảm biến điện tích được sử dụng trong những môi trường có nhiệt độ rất lớn
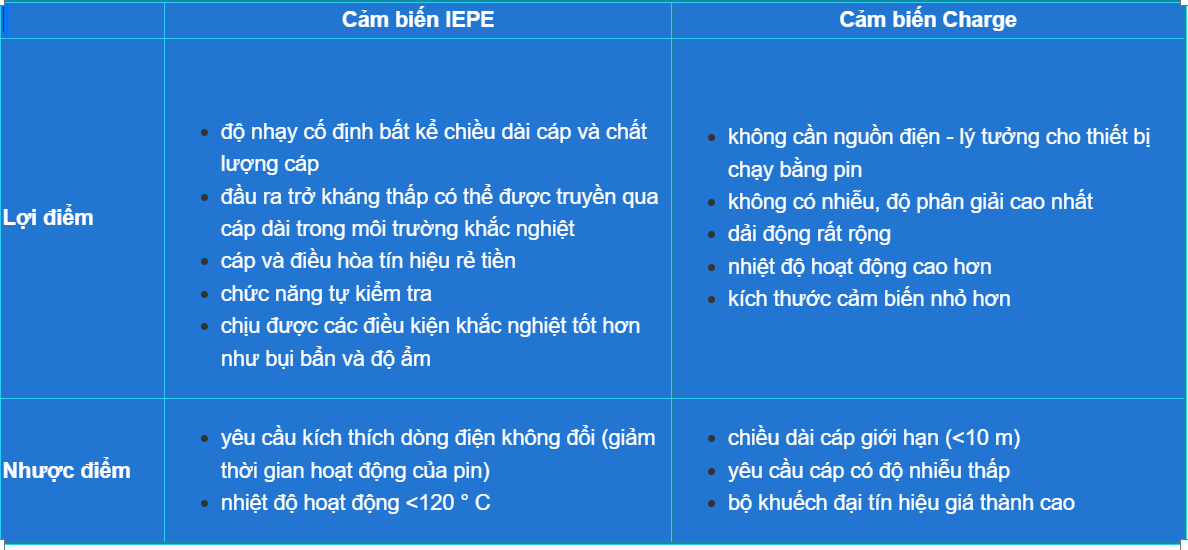
So sánh cảm biến IEPE vs Charge:
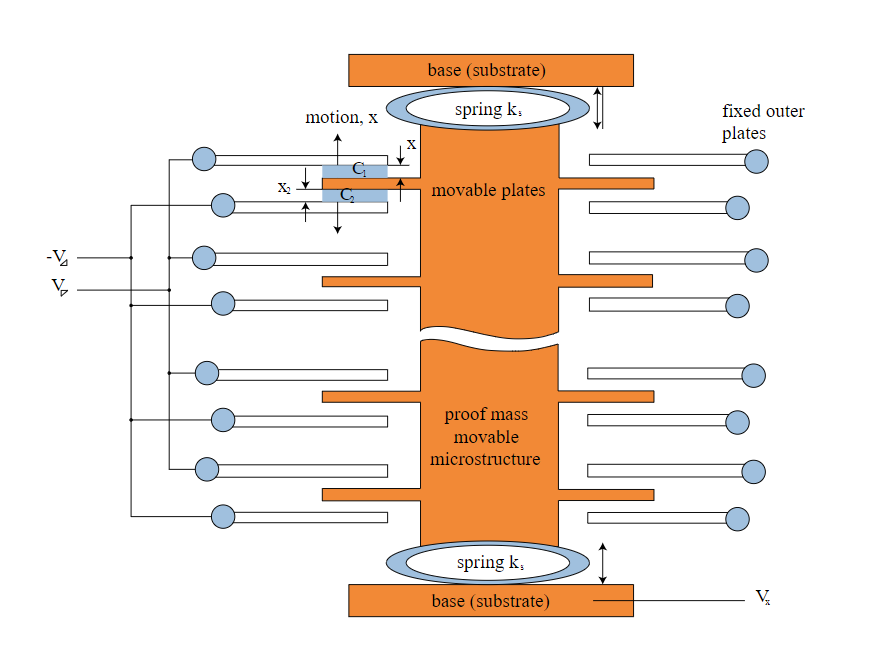
CẢM BIẾN ĐO GIA TỐC TĨNH- CẢM BIẾN MEMS:
Cả hai loại cảm biến điện tích và IEPE đều có một hạn chế chung: chúng không thể đo gia tốc tĩnh. Chúng thường bắt đầu đo từ 0,3 Hz đến 10 Hz, tùy thuộc vào cảm biến. Đối với các phép đo tĩnh hoặc tần số rất thấp, người dùng cần sử dụng một loại cảm biến khác. Một loại rất phổ biến là cảm biến MEMS. Chúng có độ nhạy tuyệt vời và cơ chế truyền dẫn không nhạy cảm với nhiệt độ.
Gia tốc kế MEMS điển hình bao gồm khối lượng bằng chứng có thể di chuyển được với các tấm được gắn vào hệ thống treo cơ học với hệ quy chiếu, như thể hiện trong hình dưới đây: