Trong bài viết này, bạn sẽ tìm hiểu về các loại cảm biến ADAS khác nhau. Chúng tôi sẽ đề cập đến chủ đề đủ sâu để bạn sẽ:
Đây là PHẦN 2/4 trong loạt bài ADAS:
Phần 1: ADAS là gì?
Phần 2: Các loại cảm biến ADAS được sử dụng hiện nay (bài viết này)
Phần 3: Hệ thống ADAS và xe tự hành được thử nghiệm như thế nào?
Phần 4: Tiêu chuẩn ADAS và giao thức an toàn
Để đi thẳng vào vấn đề, đây là danh sách các loại cảm biến ADAS chính được sử dụng hiện nay:
Chúng ta sẽ xem xét kỹ hơn từng điều này trong các phần sau.
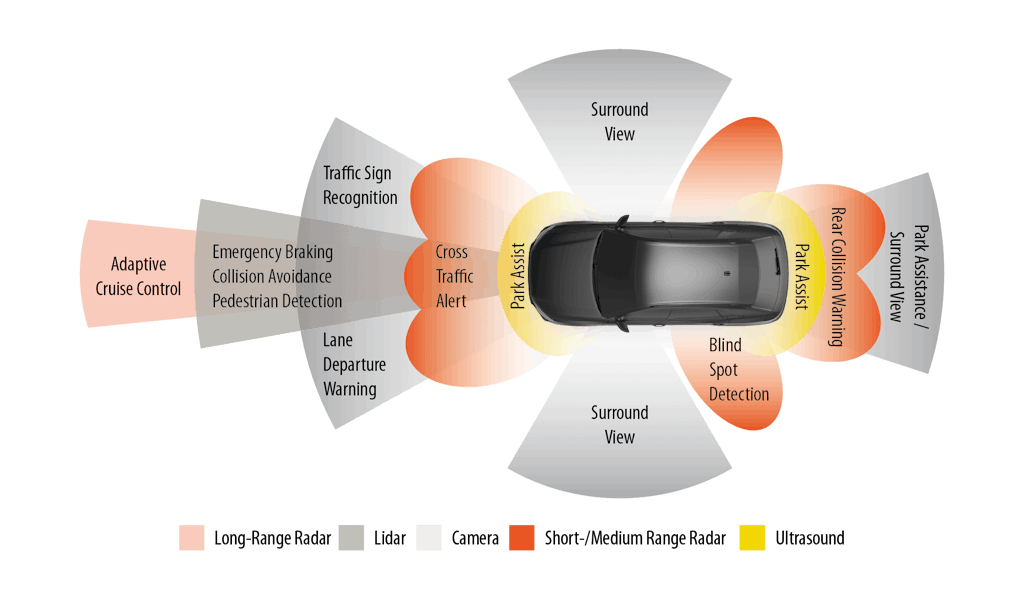
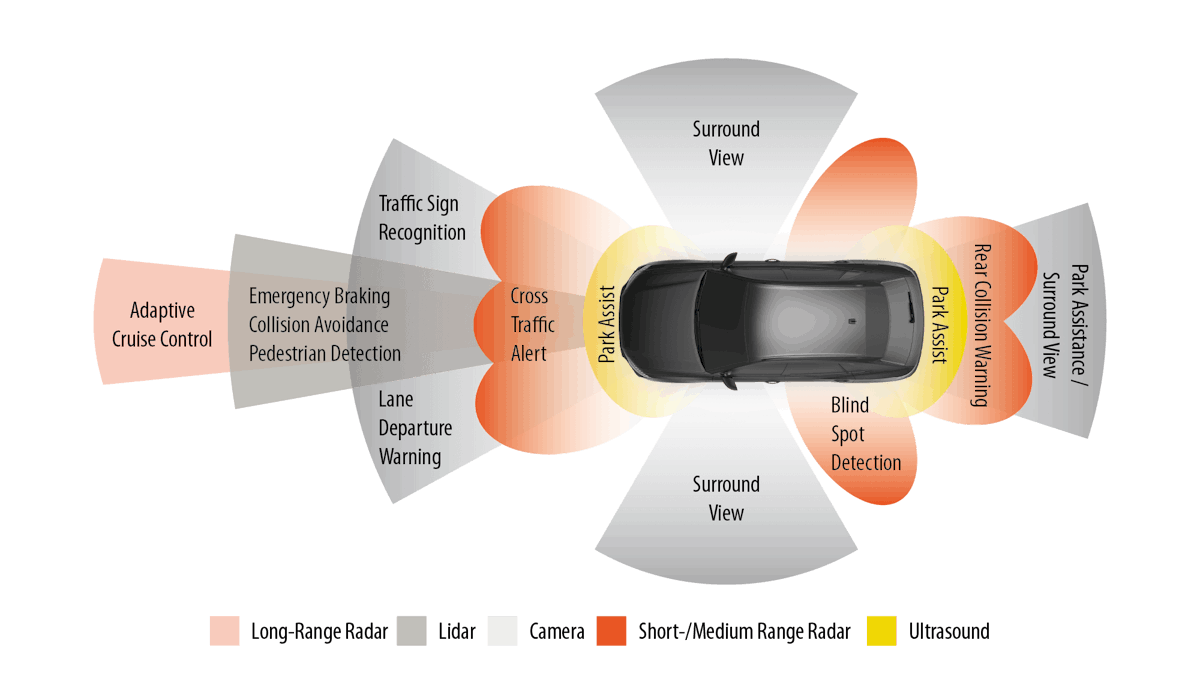
Hình minh họa cảm biến ADAS trong xe tự hành hiện đại
Một chiếc xe cần cảm biến để thay thế hoặc tăng cường các giác quan của người lái xe. Đôi mắt của chúng ta là cảm biến chính mà chúng ta sử dụng khi lái xe, nhưng tất nhiên, những hình ảnh lập thể mà chúng cung cấp cần phải được xử lý trong não của chúng ta để suy ra khoảng cách tương đối và vectơ trong không gian ba chiều.
Chúng tôi cũng sử dụng tai để phát hiện còi báo động, tiếng còi inh ỏi từ các phương tiện khác, chuông cảnh báo băng qua đường sắt, v.v. Tất cả dữ liệu cảm giác đến này được xử lý bởi bộ não của chúng ta và tích hợp với kiến thức của chúng ta về các quy tắc lái xe để chúng ta có thể vận hành xe một cách chính xác và phản ứng với những điều bất ngờ.
Các hệ thống ADAS cũng cần phải làm như vậy. Ô tô ngày càng được trang bị cảm biến RADAR, SONAR và LiDAR, cũng như nhận dữ liệu vị trí tuyệt đối từ cảm biến GPS và dữ liệu quán tính từ cảm biến IMU. Các máy tính xử lý tiếp nhận tất cả thông tin này và tạo đầu ra để hỗ trợ người lái hoặc thực hiện hành động trực tiếp, đang tăng đều đặn về sức mạnh và tốc độ để xử lý các nhiệm vụ phức tạp liên quan đến lái xe.
Giải thích về cảm biến ADAS trong xe tự hành
Lượng dữ liệu cảm biến tuyệt đối mà ô tô và xe thương mại ngày nay đang xử lý là đáng kinh ngạc và nó đang tăng lên mọi lúc. Ngay cả những con số ấn tượng trong hình dưới đây cũng sẽ bị lấn át bởi các phương tiện tự trị hoàn toàn trong tương lai.
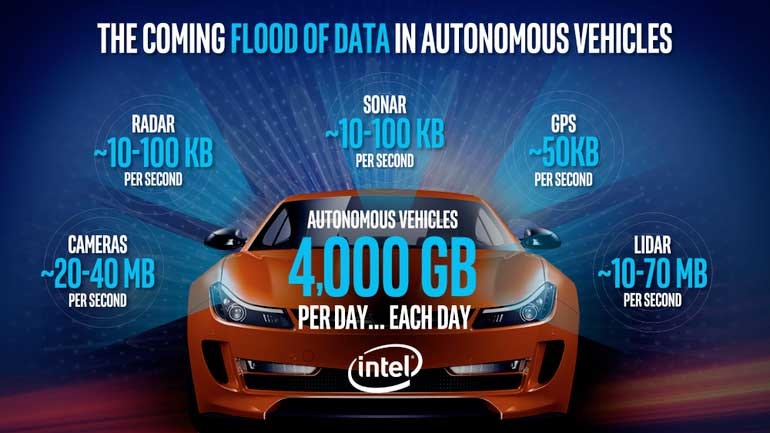
Cơn lũ dữ liệu sắp tới trong các phương tiện tự trị, như hình dung của Intel.
Việc sử dụng máy ảnh đầu tiên trong ô tô là camera dự phòng, hay còn gọi là "camera lùi". Kết hợp với màn hình video phẳng trên bảng điều khiển, camera này cho phép người lái xe lùi xe an toàn hơn vào chỗ đậu xe hoặc khi đàm phán bất kỳ thao tác nào liên quan đến việc lái xe ngược lại. Nhưng động lực ban đầu chính là cải thiện sự an toàn cho người đi bộ. Theo Bộ Giao thông Vận tải, hơn 200 người thiệt mạng và ít nhất 12.000 người khác bị thương mỗi năm vì một chiếc xe lùi vào họ. Những nạn nhân này chủ yếu là trẻ em và người già với khả năng di chuyển hạn chế.

Hình ảnh camera dự phòng trên bảng điều khiển của Toyota 4Runner
Từng chỉ được lắp đặt trên những chiếc xe cao cấp, camera dự phòng đã được yêu cầu trong tất cả các xe được bán tại Mỹ kể từ tháng 5/2018. Canada cũng áp dụng yêu cầu tương tự. Ủy ban châu Âu đang tiến tới yêu cầu một camera lùi hoặc hệ thống giám sát trong tất cả ô tô, xe tải, xe tải và xe buýt ở châu Âu vào năm 2022. Bộ Giao thông vận tải Nhật Bản đang yêu cầu các cảm biến dự phòng (máy ảnh, cảm biến siêu âm hoặc cả hai) trên tất cả các ô tô được bán tại Nhật Bản vào tháng 5/2022.
Nhưng trong các phương tiện ADAS ngày nay có thể có nhiều camera, chỉ theo các hướng khác nhau. Và chúng không chỉ để đảm bảo an toàn dự phòng nữa: đầu ra của chúng được sử dụng để xây dựng mô hình ba chiều của môi trường xung quanh xe trong hệ thống máy tính ADAS. Camera được sử dụng để nhận dạng biển báo giao thông, vạch đọc và các dấu hiệu khác trên đường, phát hiện người đi bộ, vật cản, và nhiều hơn nữa. Chúng cũng có thể được sử dụng cho mục đích bảo mật, phát hiện mưa và các tính năng tiện lợi khác.
Trong ảnh chụp màn hình này từ hệ thống camera Mobileye, bạn có thể thấy cách hệ thống xác định và dán nhãn xe cộ và người đi bộ, đồng thời xác định rằng đèn giao thông có màu xanh lá cây.
Đầu ra của hầu hết các camera này không hiển thị cho người lái xe. Thay vào đó, nó đưa vào hệ thống máy tính ADAS. Các hệ thống này được lập trình để xử lý luồng hình ảnh và xác định các biển báo dừng, ví dụ, và để hiểu rằng một chiếc xe khác đang báo hiệu rẽ phải và đèn giao thông vừa chuyển sang màu vàng, v.v. Chúng được sử dụng nhiều để phát hiện vạch kẻ đường, điều này rất quan trọng để hỗ trợ giữ làn đường. Đây là một lượng dữ liệu và sức mạnh xử lý khổng lồ, và nó chỉ tăng lên trong cuộc diễu hành hướng tới xe tự lái.
Một số loại cảm biến đang được sử dụng ngày nay, chủ yếu là CMOS và CCD. Cảm biến CCD cung cấp dải động và độ phân giải vượt trội. Tuy nhiên, cảm biến CMOS không đòi hỏi nhiều năng lượng và có thể ít tốn kém hơn do kiến trúc silicon của chúng. Cả hai công nghệ đều được xây dựng xung quanh một mảng pixel hình chữ nhật tạo ra dòng điện tương ứng với cường độ ánh sáng tập trung vào pixel đó.
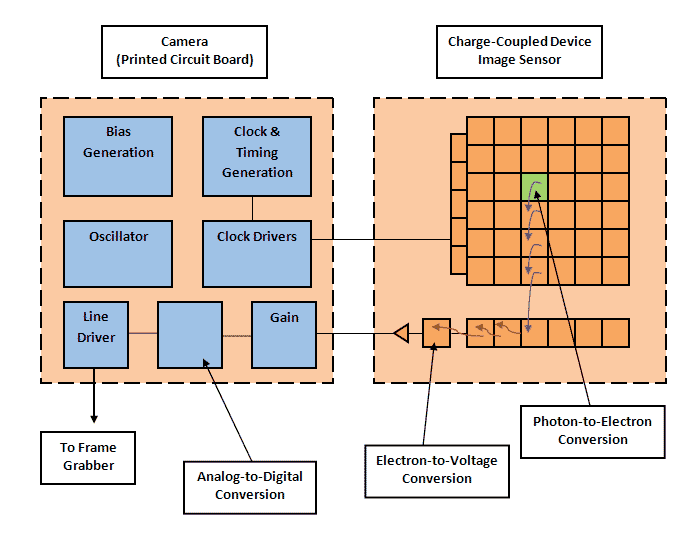
Kiến trúc CCD điển hình
Nhiều camera trên xe đã được điều chỉnh để nhìn rõ hơn trong bóng tối so với con người, thay thế cảm biến màu trắng cho cảm biến màu xanh lá cây điển hình trong cảm biến quang học RGB. Các nhà sản xuất cảm biến camera xe hơi lớn bao gồm Mobileye (một công ty Israel được Intel mua lại với giá 15,3 tỷ USD vào năm 2017) và OmniVision. Mobileye đã tuyên bố rằng nếu một người có thể lái một chiếc xe hơi chỉ bằng tầm nhìn, thì máy tính cũng vậy. Và không giống như người lái xe, camera có thể nhìn theo mọi hướng cùng một lúc.
Xem video này do Mobileye sản xuất, cho thấy 40 phút lái xe hoàn toàn tự động, không chỉnh sửa qua Jerusalem, sử dụng hệ thống 12 camera của họ. Một người lái xe đã cầm lái để đảm bảo an toàn, nhưng anh ta không bao giờ chạm vào các nút điều khiển cho đến khi cuộc thử nghiệm kết thúc.
Video Mobileye về các ổ đĩa tự trị qua Jerusalem
Tesla đã quyết định sử dụng cảm biến quang học thụ động (máy quay video) được thông báo bằng radar thay vì LiDAR. Vị trí của chúng là vì nó hoạt động bằng cách chiếu các photon trong phổ thị giác, LiDAR dễ bị nhiễu bởi sự tắc nghẽn từ mưa, bụi, tuyết, v.v. Tất nhiên, máy ảnh cũng vậy, nhưng Tesla sử dụng RADAR có thể nhìn xuyên qua những tắc nghẽn này để in phạm vi của các vật thể được phát hiện lên thế giới 3D do camera tạo ra.
Tầm nhìn là hoàn toàn cần thiết cho con người để lái xe, nhưng có nhiều cách khác để "nhìn". Ví dụ, dơi, cá voi, cá heo và các động vật khác sử dụng một hình thức định vị bằng tiếng vang để điều hướng. Tàu ngầm phát ra SONAR (sóng áp suất âm thanh) và sau đó đo sự trở lại của chúng sau khi bật ra khỏi đáy đại dương và các vật thể khác. Máy bay sử dụng RADAR để phản xạ tín hiệu tần số vô tuyến tương tự để phát hiện và đo khoảng cách đến mặt đất, máy bay khác, v.v.
Dội sóng ra khỏi các vật thể xung quanh và sau đó đo thời gian quay trở lại của chúng là trung tâm của các cảm biến tìm phạm vi. RADAR sử dụng sóng vô tuyến, LiDAR sử dụng ánh sáng và SONAR (hay còn gọi là siêu âm hay còn gọi là siêu âm) sử dụng năng lượng âm thanh. Tất cả các phương pháp cảm biến này đang được sử dụng trong các kết hợp khác nhau bởi các phương tiện được trang bị ADAS ngày nay.
Ngay cả Mobileye, công ty đi đầu trong việc sử dụng camera phát triển song song với cảm biến LiDAR, cũng xây dựng hai hệ thống hoàn toàn độc lập để tạo ra một mô hình môi trường thời gian thực tận dụng tốt nhất cả hai công nghệ.
SONAR (Sound Navigation and Ranging), hay còn gọi là cảm biến "siêu âm" tạo ra âm thanh tần số cao theo thứ tự 48 kHz, cao hơn gấp đôi so với phạm vi nghe thông thường của con người. (Thật thú vị, nhiều có thể nghe thấy những cảm biến này, nhưng chúng dường như không bị làm phiền bởi chúng.) Khi được hướng dẫn bởi ECU của xe, các cảm biến này phát ra một vụ nổ siêu âm, và sau đó chúng "lắng nghe" các phản xạ trở lại từ các vật thể gần đó.
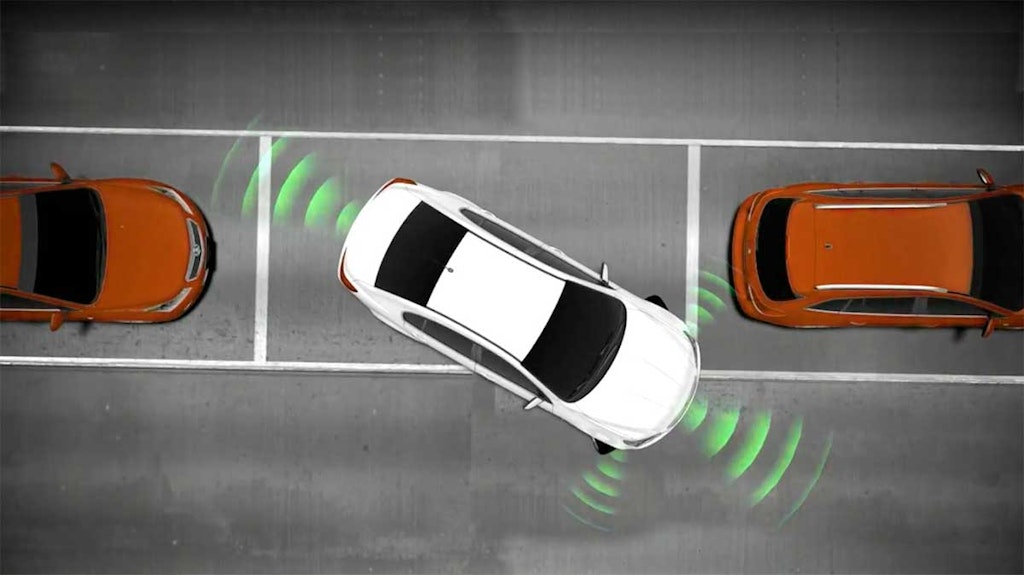
Sử dụng cảm biến sonar và âm thanh để cảm nhận các vật thể phía sau xe
Bằng cách đo sự phản xạ của âm thanh này, các cảm biến này có thể phát hiện các vật thể ở gần xe. Cảm biến siêu âm được sử dụng nhiều trong phát hiện dự phòng và cảm biến tự đỗ xe trong ô tô, xe tải và xe buýt. Chúng được đặt ở phía trước, phía sau và các góc của xe.
Vì chúng hoạt động bằng cách di chuyển không khí và sau đó phát hiện phản xạ âm thanh, chúng lý tưởng cho các ứng dụng tốc độ thấp, khi không khí xung quanh xe thường không di chuyển rất nhanh. Bởi vì chúng có bản chất âm thanh, hiệu suất siêu âm có thể bị suy giảm khi tiếp xúc với môi trường cực kỳ ồn ào.
Cảm biến siêu âm có phạm vi hạn chế so với RADAR, đó là lý do tại sao chúng không được sử dụng để đo yêu cầu khoảng cách, chẳng hạn như kiểm soát hành trình tự động hoặc lái xe tốc độ cao. Nhưng nếu vật thể nằm trong phạm vi 2,5 đến 4,5 mét (8,2 đến 14,76 feet) của cảm biến, siêu âm là một lựa chọn thay thế ít tốn kém hơn cho RADAR. Cảm biến siêu âm không được sử dụng để điều hướng vì phạm vi của chúng bị hạn chế và chúng không thể phát hiện các vật thể nhỏ hơn 3 cm (1,18 in.).

Cảm biến siêu âm là những "đĩa" tròn ở phía sau chiếc xe này (xem vòng tròn màu đỏ)
Thật thú vị, nhà sản xuất ô tô điện Tesla đã phát minh ra một cách để chiếu siêu âm qua kim loại, cho phép họ giấu các cảm biến này trên khắp xe của họ, để duy trì tính thẩm mỹ của xe. Các đĩa tròn trên cản của xe trong hình trên là cảm biến siêu âm.
Cảm biến RADAR (Radio Detection and Ranging) được sử dụng trong các phương tiện được trang bị ADAS để phát hiện các vật thể lớn phía trước xe. Chúng thường sử dụng tần số RADAR 76,5 GHz, nhưng các tần số khác từ 24 GHz đến 79 GHz cũng được sử dụng.
Hai phương pháp phát hiện RADAR cơ bản được sử dụng:
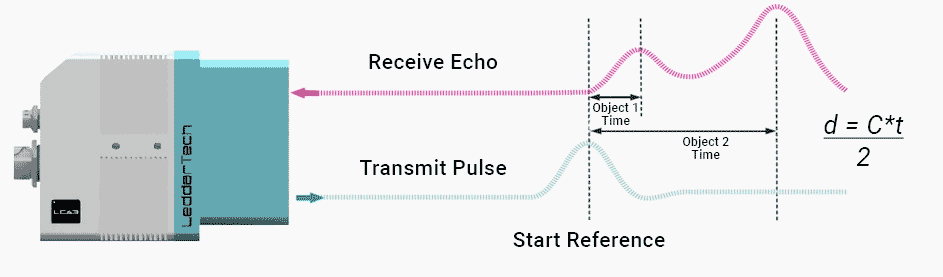
Tuy nhiên, trong cả hai trường hợp, chúng hoạt động bằng cách phát ra các tần số vô tuyến này và đo thời gian lan truyền của các phản xạ được trả về. Điều này cho phép họ đo cả kích thước và khoảng cách của một vật thể và tốc độ tương đối của nó.
Bởi vì tín hiệu RADAR có thể phạm vi 300 mét phía trước xe, chúng đặc biệt quan trọng trong quá trình lái xe tốc độ trên đường cao tốc. Tần số cao của chúng cũng có nghĩa là việc phát hiện các phương tiện và chướng ngại vật khác rất nhanh. Ngoài ra, RADAR có thể "nhìn thấy" thông qua thời tiết xấu và các tắc nghẽn tầm nhìn khác. Bởi vì bước sóng của chúng chỉ dài vài mm, chúng có thể phát hiện các vật thể có kích thước vài cm hoặc lớn hơn.
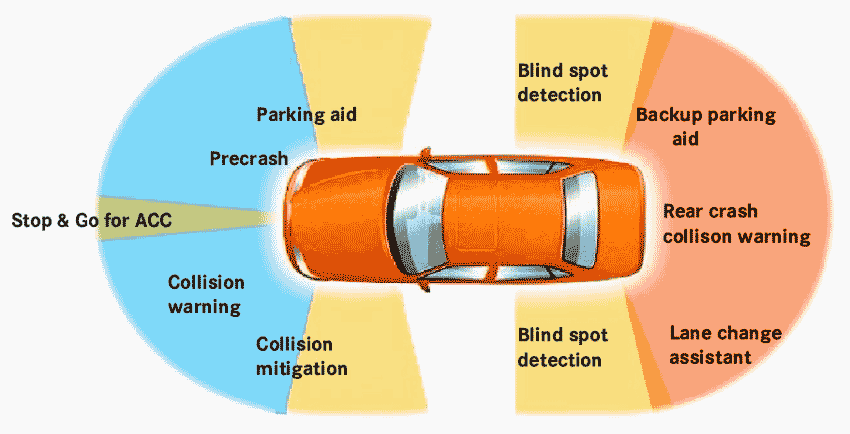
Ứng dụng cho cảm biến RADAR ô tô
RADAR đặc biệt tốt trong việc phát hiện các vật kim loại, như ô tô, xe tải và xe buýt. Như hình ảnh trên cho thấy, chúng rất cần thiết để cảnh báo và giảm thiểu va chạm, phát hiện điểm mù, hỗ trợ chuyển làn đường, hỗ trợ đỗ xe, kiểm soát hành trình thích ứng (ACC), v.v.
Hệ thống LiDAR (Light Detection and Ranging) được sử dụng để phát hiện các vật thể và lập bản đồ khoảng cách của chúng trong thời gian thực. Về cơ bản, LiDAR là một loại RADAR sử dụng một hoặc nhiều tia laser làm nguồn năng lượng. Cần lưu ý rằng các laser được sử dụng là cùng một loại an toàn cho mắt được sử dụng tại quầy thanh toán trong các cửa hàng tạp hóa.
Cảm biến LiDAR cao cấp xoay, phát ra chùm tia laser an toàn cho mắt theo mọi hướng. LiDAR sử dụng bộ thu "thời gian bay" để đo thời gian phản xạ.
Cảm biến LiDAR trạng thái rắn điển hình được sử dụng trong ô tô tự hành
IMU và GPS thường được tích hợp với LiDAR để hệ thống có thể đo thời gian cần thiết để các chùm tia bật trở lại và tính đến sự dịch chuyển của xe trong thời gian tạm thời, để xây dựng mô hình 3D có độ phân giải cao của môi trường xung quanh xe được gọi là "đám mây điểm". Hàng tỷ điểm được chụp trong thời gian thực để tạo ra mô hình 3D này, quét môi trường lên đến 300 mét (984 ft.) xung quanh xe và trong vòng vài cm (~ 1 in.) độ chính xác.
Cảm biến LiDAR có thể được trang bị tới 128 tia laser bên trong. Càng nhiều laser, đám mây điểm 3D có độ phân giải càng cao.
Ngoài công nghệ LiDAR kéo sợi do Velodyne phát minh, còn có LiDAR trạng thái rắn trên thị trường hiện nay. Trên thực tế, bản thân Velodyne cung cấp một số cảm biến LiDAR trạng thái rắn. Một nhà phát triển khác là Quanergy, công ty tạo ra LiDAR dựa trên CMOS sử dụng công nghệ mảng pha quang học để hướng dẫn từng xung laser theo một hướng đã chọn thay vì quay gương.
LiDAR có thể phát hiện các vật thể với độ chính xác cao hơn nhiều so với cảm biến RADAR hoặc siêu âm, tuy nhiên, hiệu suất của chúng có thể bị suy giảm do nhiễu từ khói, sương mù, mưa và các tắc nghẽn khác trong khí quyển. Nhưng, vì chúng hoạt động độc lập với ánh sáng xung quanh (chúng chiếu ánh sáng của chính chúng), chúng không bị ảnh hưởng bởi bóng tối, bóng tối, ánh sáng mặt trời hoặc đèn pha đang tới.
Cảm biến LiDAR thường đắt hơn RADAR vì độ phức tạp cơ học tương đối của chúng. Chúng ngày càng được sử dụng cùng với máy ảnh vì LiDAR không thể phát hiện màu sắc (chẳng hạn như màu sắc trên đèn giao thông, đèn phanh đỏ và biển báo đường bộ), cũng như không thể đọc văn bản cũng như máy ảnh. Máy ảnh có thể làm cả hai điều đó, nhưng chúng đòi hỏi nhiều sức mạnh xử lý hơn phía sau chúng để thực hiện các tác vụ này.
Để biến xe tự lái thành hiện thực, chúng tôi cần một hệ thống định vị có độ chính xác cao. Các phương tiện ngày nay đang sử dụng Hệ thống vệ tinh dẫn đường toàn cầu (GNSS). GNSS không chỉ là "GPS" mà mọi người đều biết.
GPS, viết tắt của Global Positioning System là một chòm sao gồm hơn 30 vệ tinh quay quanh hành tinh. Mỗi vệ tinh phát ra dữ liệu thời gian và vị trí cực kỳ chính xác liên tục. Khi một máy thu nhận được tín hiệu có thể sử dụng từ ít nhất bốn trong số các vệ tinh này, nó có thể định vị vị trí của nó. Càng nhiều tín hiệu có thể sử dụng, kết quả càng chính xác.
Nhưng GPS không phải là hệ thống định vị toàn cầu duy nhất. Có nhiều chòm sao vệ tinh GNSS quay quanh trái đất ngay bây giờ:
Các hệ thống GNSS tốt nhất được cài đặt trong các phương tiện ngày nay có khả năng sử dụng hai hoặc ba trong số các chòm sao này. Sử dụng nhiều tần số cung cấp hiệu suất tốt nhất có thể vì nó làm giảm lỗi do độ trễ tín hiệu, đôi khi do nhiễu khí quyển. Ngoài ra, vì các vệ tinh luôn di chuyển, các tòa nhà cao tầng, cũng như đồi và các vật cản khác, có thể chặn một chòm sao nhất định vào những thời điểm nhất định. Do đó, việc có thể truy cập nhiều hơn một chòm sao sẽ giảm thiểu sự can thiệp này.
Dưới đây là khoảng tần số của các chòm sao GNSS phổ biến nhất hiện nay:
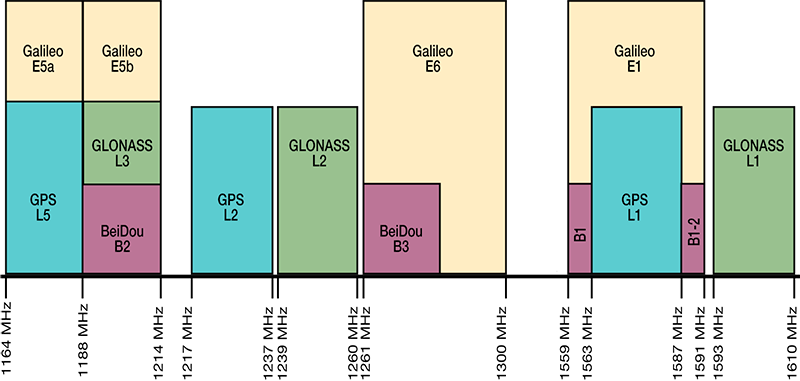
Khoảng tần số của các chòm sao GNSS phổ biến nhất hiện nay
GNSS loại tiêu dùng (phi quân sự) cung cấp độ chính xác vị trí khoảng một mét (39 inch). Điều này là tốt cho hệ thống định vị điển hình trong một chiếc xe do con người vận hành. Nhưng để tự chủ thực sự, chúng ta cần độ chính xác ở cấp độ centimetre.
Độ chính xác của GNSS có thể được cải thiện bằng cách sử dụng hệ thống tăng cường khu vực hoặc cục bộ. Có cả hệ thống mặt đất và không gian được sử dụng ngày nay cung cấp tăng cường GNSS. Các hệ thống tăng cường trên mặt đất được gọi chung là GBAS, trong khi các hệ thống tăng cường trên vệ tinh hoặc không gian được gọi chung là SBAS.
Chỉ một vài trong số các hệ thống SBAS được sử dụng ngày nay:
Một số hệ thống GBAS đang được sử dụng hiện nay:

Cảm biến GNSS INS1000
Một ví dụ tuyệt vời về cách GNSS, IMU và các hệ thống tăng cường đang được tích hợp vào cảm biến ADAS ngày nay là cảm biến GNSS INS1000 của ACEINNA. Nó là một GNSS với L1 / L2 RTK tần số kép và IMU dựa trên con quay hồi chuyển MEMS bên trong và gia tốc kế. Nó tương thích với các chòm sao GPS, GLONASS, Beidou và Galileo GNSS cũng như tăng cường SBAS.
Với hiệu chỉnh RTK, họ tuyên bố độ chính xác vị trí là 2 cm (0,78 inch).
Khi chúng tôi lái xe vào một nhà để xe hoặc đường hầm có mái che, các tín hiệu GNSS từ bầu trời bị chặn hoàn toàn bởi mái nhà. Cảm biến IMU (đơn vị đo lường quán tính) có thể cảm nhận được những thay đổi về gia tốc ở tất cả các trục và thực hiện "tính toán chết" vị trí của xe cho đến khi các vệ tinh quay trở lại. Độ chính xác tính toán chết trôi theo thời gian, nhưng nó rất hữu ích trong thời gian ngắn khi hệ thống GNSS bị "mù".
Lái xe trong mọi điều kiện, máy ảnh, cảm biến LiDAR, SONAR và RADAR có thể cung cấp độ chính xác vị trí ở mức centimet mà GNSS đơn giản là không thể (không cần hiệu chỉnh từ RTK). Họ cũng có thể cảm nhận được các phương tiện khác, người đi bộ, et al - điều mà GNSS không có nghĩa là làm vì các vệ tinh không phải là cảm biến - họ chỉ đơn giản là báo cáo thời gian và vị trí của họ rất chính xác.
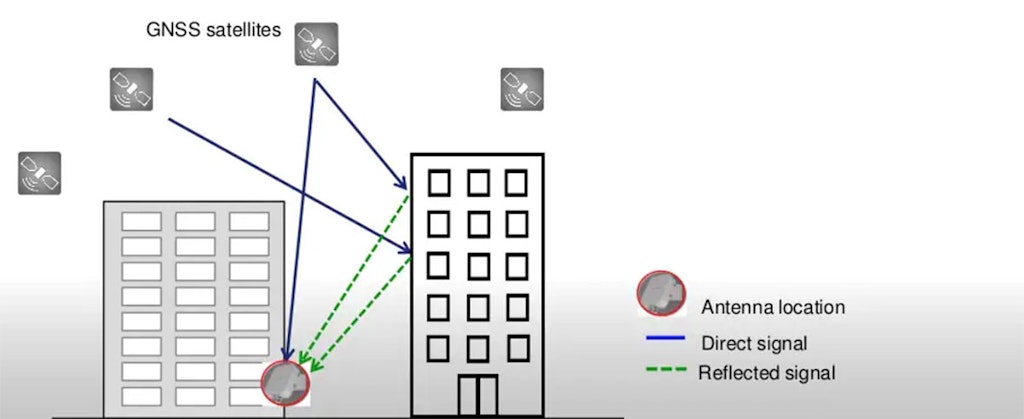
"Hẻm núi đô thị", nơi các tòa nhà cao hơn chiều rộng đường, gây ra hiệu ứng đa đường, làm giảm khả năng tiếp nhận GNSS
Ở các thành phố, các tòa nhà tạo ra cái gọi là "hẻm núi đô thị" nơi tín hiệu GNSS dội lại xung quanh, dẫn đến nhiễu đa đường (cùng một tín hiệu đến ăng-ten GNSS vào những thời điểm khác nhau, gây nhầm lẫn cho bộ xử lý). IMU có thể tính toán trong những điều kiện này để cung cấp dữ liệu vị trí quan trọng, trong khi các cảm biến khác (camera, LiDAR, RADAR và SONAR) tiếp tục cảm nhận thế giới xung quanh xe ở mọi phía.
Một chiếc xe do con người điều khiển hoạt động vì chúng ta có tầm nhìn lập thể và có thể suy ra khoảng cách và vận tốc tương đối trong não của chúng ta. Ngay cả khi nhắm một mắt, chúng ta có thể suy ra khoảng cách và kích thước bằng cách sử dụng tầm nhìn một mắt khá chính xác vì bộ não của chúng ta được đào tạo bởi kinh nghiệm thực tế.

Cảm biến quang học thụ động lập thể của chúng tôi
Mắt và não của chúng ta cũng cho phép chúng ta đọc và phản ứng với các dấu hiệu và đi theo bản đồ, hoặc đơn giản là nhớ phải đi con đường nào vì chúng ta biết khu vực. Chúng tôi biết cách kiểm tra gương nhanh chóng để chúng tôi có thể nhìn theo nhiều hướng mà không cần quay đầu lại.
Bộ não của chúng ta biết các quy tắc lái xe. Tai của chúng ta có thể nghe thấy còi báo động, tiếng còi và các âm thanh khác, và bộ não của chúng ta biết cách phản ứng với những âm thanh này trong bối cảnh. Chỉ cần lái xe một quãng ngắn để mua sữa và bánh mì, một người lái xe đưa ra hàng ngàn quyết định và thực hiện hàng trăm điều chỉnh cơ học, lớn và nhỏ, bằng cách sử dụng các điều khiển tay và chân của xe.
Thay thế các cảm biến quang học và âm thanh kết nối với một bộ não được tạo thành từ khoảng 86 tỷ tế bào thần kinh không phải là điều dễ dàng. Nó đòi hỏi một bộ cảm biến và xử lý rất tiên tiến, nhanh chóng, chính xác và chính xác. Những chiếc xe tự lái thực sự đang được phát triển để học hỏi từ kinh nghiệm của chúng giống như con người và tích hợp kiến thức đó vào hành vi của họ.
Mỗi cảm biến được sử dụng trong xe ADAS đều có điểm mạnh và điểm yếu - ưu điểm và nhược điểm:
Các hệ thống IMU cung cấp tính toán chết mà các hệ thống GNSS cần khi đường ngắm lên bầu trời bị chặn hoặc bị xáo trộn bởi tín hiệu đa đường trong "hẻm núi đô thị".
Các cảm biến này bổ sung cho nhau và cho phép bộ xử lý trung tâm tạo ra mô hình ba chiều về môi trường xung quanh xe, để biết phải đi đâu và làm thế nào để đến đó, tuân theo các quy tắc lái xe và phản ứng với dự kiến và bất ngờ xảy ra trên mọi con đường và bãi đậu xe.
Nói tóm lại, chúng ta cần tất cả, hoặc kết hợp chúng, để đạt được ADAS và cuối cùng là lái xe tự động.
Khi bạn còn là một đứa trẻ, bạn có bao giờ nghĩ rằng chiếc xe của gia đình bạn sẽ được trang bị RADAR và SONAR như máy bay và tàu ngầm không? Bạn thậm chí có biết LiDAR là gì không? Bạn có tưởng tượng màn hình phẳng thống trị bảng điều khiển và hệ thống định vị kết nối với vệ tinh trong không gian không? Nó có vẻ giống như khoa học viễn tưởng, và hoàn toàn ngoài tầm với trong ít nhất 100 năm. Nhưng ngày nay, tất cả những điều đó và hơn thế nữa là một thực tế.
ADAS là loại phát triển quan trọng nhất đang diễn ra ngày nay. Tất nhiên, có những phát triển năng lượng hybrid và điện diễn ra song song, điều này cũng cực kỳ quan trọng để giảm khí nhà kính và sử dụng nhiên liệu hóa thạch. Thật khó để kể tên một nhà sản xuất ô tô chưa bán các phiên bản điện của ô tô của họ hoặc đang trong giai đoạn phát triển muộn.
Nhưng ADAS đi thẳng vào khía cạnh quan trọng nhất của du lịch: sự an toàn của con người. Vì hơn 90% tai nạn đường bộ, thương tích và tử vong là do lỗi của con người, mọi tiến bộ trong ADAS đều có tác dụng rõ ràng và tuyệt đối trong việc ngăn ngừa thương tích và tử vong.